Salamanpaikannus
Salamanpaikannus tarkoittaa salamoiden sijainnin ja ajankohdan määrittämistä liki reaaliajassa automaattisia mittausjärjestelmiä käyttäen. Tällöin paikannetut salamat voidaan sijoittaa karttapohjalle ja mahdollisesti esittää yhdessä esimerkiksi sadetutkakuvan kanssa.
Salamanpaikannustietoja käytetään pääasiassa ukkospilvien tunnistamiseen ja niiden liikkeiden seurantaan. Salamanpaikannustiedot yhdessä tutkakuvan kanssa muodostavatkin erinomaisen työkalun lyhyen aikavälin (1...2 tunnin) ennusteisiin, jotka perustuvat jo havaittujen ukkosten liikeratojen jatkamiseen nykyhetkestä hieman ajassa eteenpäin.
Jos esimerkiksi ukkosrintama lähestyy likimain vakionopeudella tiettyä paikkakuntaa, voidaan helposti laskea arvio ukkosen saapumisesta sinne olettaen rintaman liikkeen jatkuvan samalla tavalla. Salamahavaintoja voidaan käyttää myös ukkosen voimakkuuden määrittelemiseen tietyllä paikkakunnalla laskemalla salamatiheyksiä eli salamoiden lukumäärää kyseisellä alueella (tyypillisesti 20 x 20 km ruudussa).
Lue aiheesta enemmän Suomen ukkosilmastoa käsittelevällä sivulla.
Tarkka salamanpaikannusjärjestelmä mahdollistaa myös salamavahinkotapausten tutkimisen, sillä parhaimmillaan paikannettujen maasalamoiden (= maahan iskevä salama) sijainti saadaan määritetyksi muutaman sadan metrin tarkkuudella. Jos vahinkoja omaisuudelle syntyy, niin silloin ainakin vahinkopaikka on jo sen perusteella tiedossa, mutta salamanpaikannusjärjestelmän tietojen perusteella voidaan tarvittaessa osoittaa vahinko salaman aiheuttamaksi tai voidaan tutkia minkälainen salamavirta kyseisen vahingon sai aikaan. Toisaalta jos "vahinkopaikka" on pitkä sähkölinja, voidaan salamanpaikannustietojen avulla löytää todennäköinen tarkempi vahinkopaikka kyseisellä linjalla olettaen että vika on suoran salamaniskun aiheuttama. Tässä jälkimmäisessä tapauksessa etsitään siis sähkölinjalle paikannettuja salamoita kyseisen ukkosen aikana.
Salamanpaikannustietojen perusteella laaditaan myös tilastoja keskimääräisistä maasalamatiheyksistä, joiden perusteella voidaan arvioida ukkosen ja salamoinnin aiheuttamaa riskiä jollakin tietyllä alueella. Käyttökelpoisen tilastomateriaalin kokoaminen vaatii kuitenkin pitkän ajan (10...30 vuotta), koska ukkonen on sääilmiönä hyvin paikallinen ja maantieteellinen esiintyminen vaihtelee kesästä toiseen suuresti. Sen vuoksi vain muutaman ukkoskauden perusteella ei voi tehdä päätelmiä keskimääräisestä ukkosilmastosta. Lisäksi ukkosilmasto on, aivan kuten tavanomainen sääilmastokin, jatkuvan muutoksen alaisena.
NORDLIS salamanpaikannusverkko
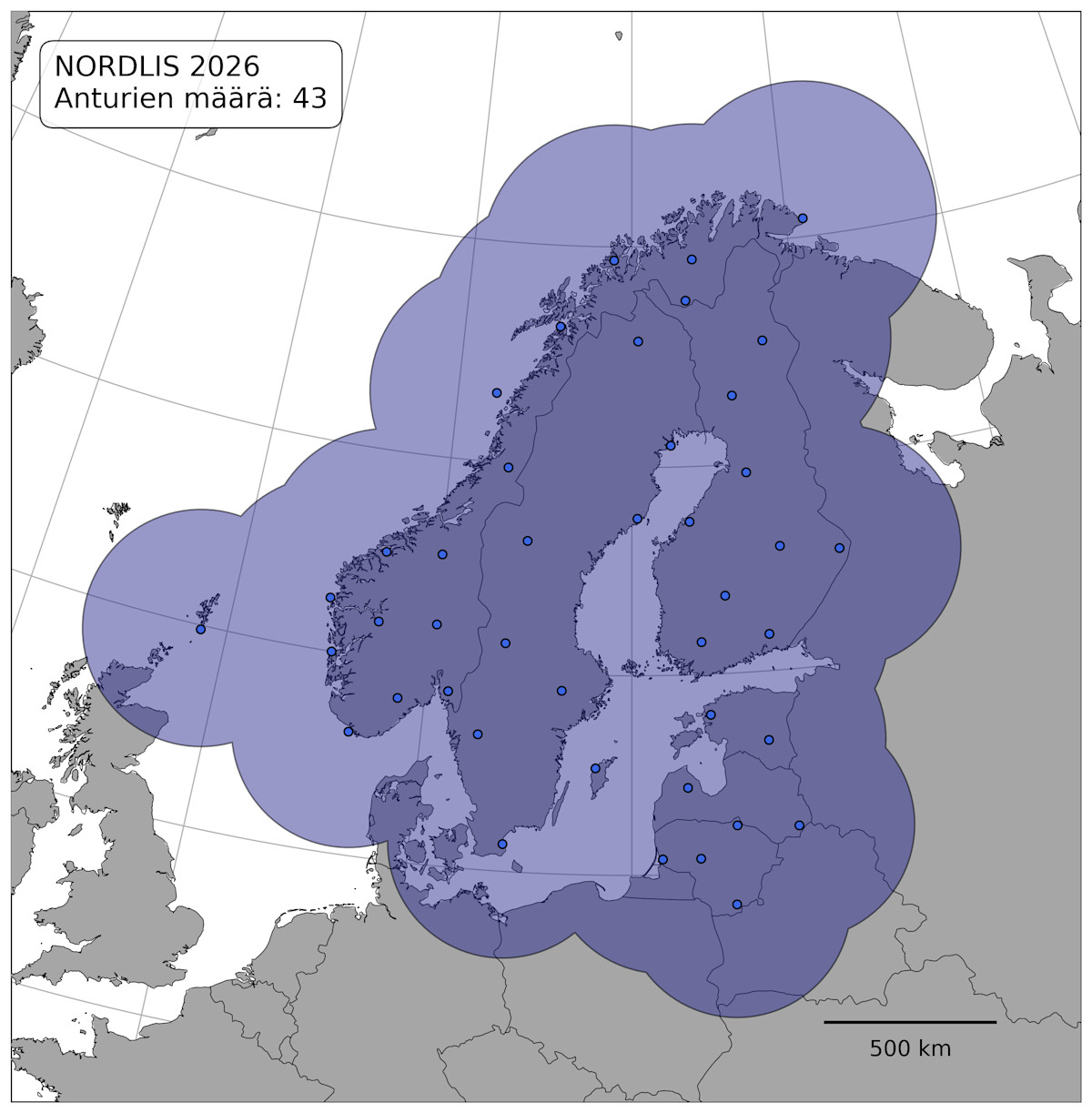
Ilmatieteen laitoksen salamadata on peräisin yhteispohjoismaisesta NORDLIS-salamanpaikannusverkosta, johon kuuluvat anturit sijaitsevat Norjassa, Ruotsissa, Suomessa ja Virossa. Paikannusjärjestelmä kattaa koko tämän alueen ja kohtuullisen hyvin kaikki ympäröivät alueet noin 500 kilometrin etäisyydelle anturiverkon ulkopuolelle.
Havainnot sisältävät lähes kaikki maasalamat osaiskuineen sekä osan pilvisalamoista. Pilvisalamoiden havaintotehokkuus on kuitenkin oleellisesti heikompi kuin maasalamoiden. Keskeisimmät paikantimen ilmoittamat parametrit ovat salamoiden aika- ja paikkatieto. Järjestelmä ilmoittaa lisäksi mm. arvion salaman huippuvirralle (salamavirran maksimiarvo; kA) sekä paikannustarkkuudelle.
Salama-antureita on koko NORDLIS -verkossa yli 40 kappaletta (2026) ja voimakkaimpien salamaniskujen paikantaminen saattaa tapahtua jopa yli 20 anturin havaintoihin perustuen. Tämä kuvaa hyvin sitä, kuinka voimakkaan salaman synnyttämä radiosignaali on vastaanotettavissa hyvin laajalla alueella kaikkialla Pohjois-Euroopassa. Naapurimaiden antureista on siis suoraan hyötyä myös Suomen alueen salamanpaikannuksessa. Toisaalta taas pienivirtaiset salamat havaitaan ainoastaan kaikkein lähimpänä olevien antureiden avulla, joten verkostossa tulee olla tarpeeksi paljon antureita korkean havaintotehokkuuden ylläpitämiseksi.